I spent the last days of development working on the new codriver, not intended as a voice, but as artificial intelligence (AI).
Why? let’s take a step back:
How does the codriver work?
Unlike other rally titles, our codriver is quite different: the simple method not used (now
call this method static) is to have the note read at a specific point of the stage, and the
codriver, when comes to this point, reads the note:
static method pros:
- single note customization;
- notes accuracy after their single editing;
static method cons:
- initially you have to set up the notes manually and one by one;
- it is difficult to be able to interpret the same notes as equal;
- their future customization takes time;
- for the standard user who has no desire and knowledge to customize the notes, shiuld drive with wrong notes;
Recce
The first operation to do is the recce (reconnaissance): you have to take the special test looking for to make your best possible driving line avoiding absolutely to correct the steering, because the steering angle is recorded and if one countersteer, the curve calculation is wrong.
After doing this you save the replay and launch the Recce mode, which will generate the file with
the road characteristics.
![]() In the future during this phase you will have the possibility to set all the notes that
can not be inserted automatically with the recognition (such as bumps, cuts, stay on the right
etc…)
In the future during this phase you will have the possibility to set all the notes that
can not be inserted automatically with the recognition (such as bumps, cuts, stay on the right
etc…)
Usage
Before driving the driver can choose which recce to use (generally the special stages already have their recce by default, to be used by anyone immediately, but a driver can also have more recce for each special stage, maybe a more ‘risky and fast’ and a more ‘safe’…) and, before leaving the AI codriver turns the recce into notes, to do this the pilot can change the following settings:
Steering angles
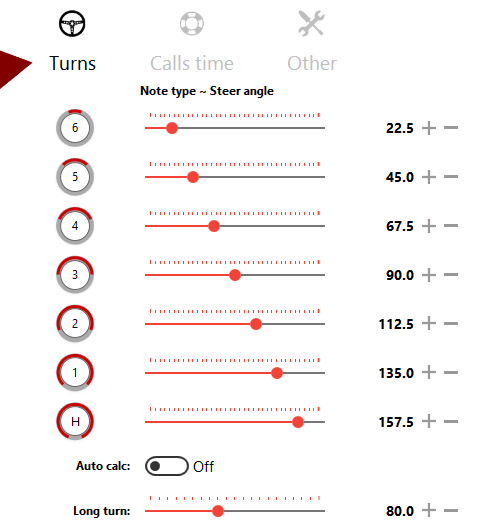 As already mentioned, the curves are not ‘fixed’ but they are the combination of recce at steering
angles.
As already mentioned, the curves are not ‘fixed’ but they are the combination of recce at steering
angles.
By changing these settings the driver has the guarantee that all the curves with similar steering angles will be called with the same note.
This point may seem stupid, but how often did you make a curve too slowly or end up off the road because the call indicated a different curve from the previous similar ones?
On this page you can change the angles for each curve, keeping in mind that between a curve and the other there are also plus and minus detail notes: in the example the 6 has 22.5 °, the 5 has 45 °.. the angles between these two notes are still divided to have plus or minus notes.
Pacenote timing
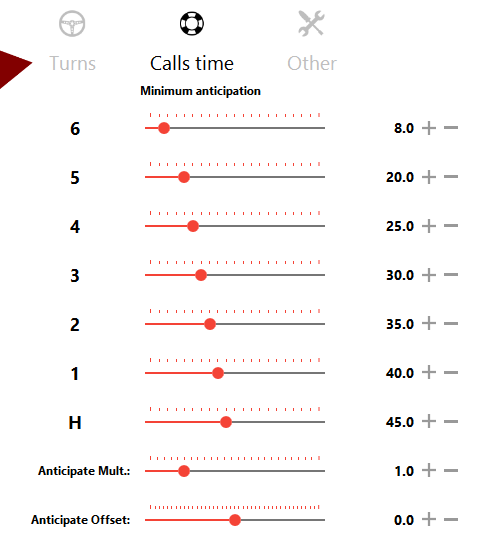 Another feature of our AI codriver is that the pacenote timing is not fixed (as already said, as if
reading the signs placed in a fixed point of the special stage), but it is dynamically calculated
on the basis of parameters, some editable in this section, others calculated internally, connected
to the power engine of the car, to the speed, to the consecutivity of the notes.
Another feature of our AI codriver is that the pacenote timing is not fixed (as already said, as if
reading the signs placed in a fixed point of the special stage), but it is dynamically calculated
on the basis of parameters, some editable in this section, others calculated internally, connected
to the power engine of the car, to the speed, to the consecutivity of the notes.
This point has created a lot of difficulties, precisely because a good codriver manages the pacenote timing in a natural and extremely variable way, to perfectly adapt the cadence with the road.
Turning all this into rules was not easy, but the intelligence of the gRally codriver is improving considerably.
Other settings
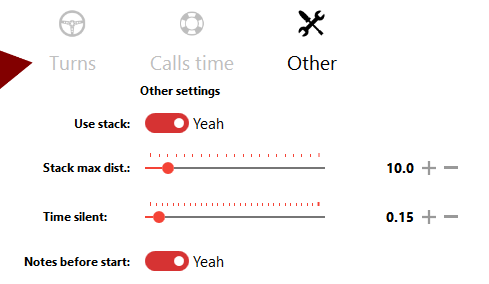 The last screen contains general settings for the codriver: here you can enable / disable the notes
before the start (many codrivers before the start read the first notes to the pilot so that at the
start already know what awaits him, and then repeat it correctly after the start), the possibility
to enable the stack of notes (relative to the maximum distance), the pause time between one note
and the other, useful to improve the cadence and the rythm of the notes while driving.
The last screen contains general settings for the codriver: here you can enable / disable the notes
before the start (many codrivers before the start read the first notes to the pilot so that at the
start already know what awaits him, and then repeat it correctly after the start), the possibility
to enable the stack of notes (relative to the maximum distance), the pause time between one note
and the other, useful to improve the cadence and the rythm of the notes while driving.
These changes will be available soon, it is not yet perfect as I would like, but in my opinion already much better than the current codriver!
If you want you can discuss about this article on steam discussion or on gRally official forum